
Décupler les angles
Ce texte est une promenade circulaire, qui part d’un point du cercle d’angle \(\theta\) et bondit au point d’angle \(10\,\theta\pmod{2\pi}\), puis à celui d’angle \(100\,\theta\), etc. Au détour de notre balade apparaîtront nombres rationnels, développement décimal et approximations rationnelles des nombres réels puis, en fin de parcours, quelques déformations irrégulières du cercle initial pointeront leur nez.
Serge Cantat
© APMEP Mars 2019
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅♦⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
Le cercle
Le cercle centré à l’origine du plan et de rayon \(1\) sera noté \(\mathscr{S}\) : un point d’abscisse \(x\) et d’ordonnée \(y\) est situé sur le cercle \(\mathscr{S}\) si et seulement si \(x^2+y^2=1\) ; il existe alors un unique nombre réel \(t\) compris entre \(0\) et \(1\) tel que \(x=\cos(2\pi
t)\) et \(y=\sin(2\pi t)\). L’angle \(t\) est donc ici compté en nombre de tours, ou encore en proportion d’un tour complet, ceci en partant du point \((1,0)\) et en tournant dans le sens direct (l’inverse du sens des aiguilles d’une montre). Ainsi, lorsque \(t=\dfrac{1}{3}\), le point \((x,y)\) est situé dans le deuxième quadrant.
Le décuplement de l’angle
Le décuplement de l’angle est l’application \(f\colon
\mathscr{S}\to \mathscr{S}\) qui, au point \[(x,y)=\bigl(\cos(2\pi t), \sin(2\pi t)\bigr)\] associe le point image \(f(x,y)\) dont l’angle est dix fois plus grand ; on change donc \(t\) en \(10\,t\), si bien que \[f(x,y)=\bigl(\cos(20\pi t), \sin(20\pi t)\bigr).\] Le doublement de l’angle pourrait être défini de manière similaire en changeant \(t\) en \(2t\). Nous pourrions aussi définir le triplement de l’angle, et plus généralement la multiplication de l’angle par n’importe quel entier \(k\). Les propriétés que nous allons décrire dans la suite dépendraient de \(k\), mais les phénomènes essentiels apparaissent pour n’importe quel entier distinct de \(-1\), \(0\) et \(1\).
Si l’on utilise des nombres complexes \(z=x+\text{i} y\), avec \(\text{i}^2=-1\), les points du cercle sont de la forme \(z=\exp(2 \text{i}
\pi t)\) et \(f\) est l’application qui transforme \(z\) en \(f(z)=z^{10}\).
Trajectoires
Nous allons étudier la transformation \(f\colon \mathscr{S} \to
\mathscr{S}\) comme un processus régissant l’évolution temporelle des points du cercle \(\mathscr{S}\) ; en sciences physiques, on dirait que \(\mathscr{S}\) est l’espace des phases et que \(f\) est la loi d’évolution du système. Mais ici le temps s’écoule discontinûment : le système évolue par à-coups, son angle étant décuplé à chaque seconde. Ainsi, un point initial \((x,y)\) du cercle passe en \((x_1,y_1)=f(x,y)\) à la première seconde, puis en \((x_2,y_2)=f(x_1,y_1)=f\bigl(f(x,y)\bigr)\) à la deuxième seconde, et ainsi de suite.
L’indice \(n\) dans la notation \((x_n,y_n)\) correspond au temps écoulé, donc au nombre d’applications de la transformation \(f\). Le point de départ sera donc souvent noté \((x_0,y_0)\), l’indice \(0\) correspondant à l’instant initial.
Par définition, la trajectoire — ou orbite — du point \((x,y)\) est la succession des points \((x_n,y_n)\) ; il s’agit donc d’une suite de points situés sur le cercle, l’angle du \((n+1)\)-ième étant dix fois celui du \(n\)-ième. Cette dernière affirmation doit être précisée, car nous avons supposé que l’angle était compris entre \(0\) et \(1\). L’orbite \((x_n,y_n)\) d’un point correspond donc à une succession d’angles \(t_n\) tels que \[t_{n+1}\equiv10\,t_n\pmod{1}.\]
Par exemple, si l’angle initial \(t_0\) est égal à \(\dfrac{1}{7}\), alors \(10\,t_0\) vaut \(\dfrac{10}{7}=1+\dfrac{3}{7}\) ce qui correspond à l’angle \(\dfrac{3}{7}\) si on le rapporte entre \(0\) et \(1\) ; ainsi, le point d’angle \(t_0=\dfrac{1}{7}\) se trouve transporté en le point d’angle \(t_1=\dfrac{3}{7}\) par \(f\). Le point suivant de la trajectoire correspond à \(10\,t_1=\dfrac{30}{7}=4+\dfrac{2}{7}\), soit un angle \(t_2=\dfrac{2}{7}\cdotp\) Et ainsi de suite. La suite \((t_n)\) des angles obtenus en partant de la position initiale \(t_0=\dfrac{1}{7}\) devient
\[\begin{aligned}
t_0& =\dfrac{1}{7}\thinspace ; \ t_1=\dfrac{3}{7}\thinspace ; \ t_2= \dfrac{2}{7}\thinspace ; \ t_3=\dfrac{6}{7}\thinspace ; \
t_4=\dfrac{4}{7}\thinspace ;\\
\text{puis }t_5& =\dfrac{5}{7}\thinspace ; \ t_6=\dfrac{1}{7}=t_0\thinspace ; \ t_7=\dfrac{3}{7}=t_1\thinspace ; \ \text{etc.}\end{aligned}\]
si bien que la suite des angles est périodique : elle passe et repasse successivement par les valeurs \(t_0\) à \(t_5\).
Puisque les angles déterminent les points \((x_n,y_n)\), la trajectoire de \((x_0,y_0){=}\left(\cos\left(\dfrac{2\pi}{7}\right),\sin\left(\dfrac{2\pi}{7}\right)\right)\) est elle-même périodique.
Lorsque l’angle initial est un nombre rationnel \(t_0=\dfrac{p}{q}\), les angles \(t_n\) sont de la forme \(\dfrac{p_n}{q}\) où \(p_n\) est l’entier compris entre \(0\) et \(q-1\) qui est égalà \(10^np\pmod{q}\). Ainsi, \(p_{n+1}\equiv
10p_n\pmod{q}\). En partant de \(t_0=\dfrac{3}{13}\), nous obtenons \(p_1\equiv30\pmod{13}\), ce qui donne \(p_1=4\) et un angle \(t_1\) égal à \(\dfrac{4}{13}\cdotp\) Ensuite, la suite des entiers \(p_n\pmod{13}\) est \[p_2=1\thinspace ; \ p_3=10\thinspace ; \ p_4=9\thinspace ; \ p_5=12\thinspace ; \ p_6=3=p_0\thinspace ;\] \[p_7=4=p_1\thinspace ;\ p_8=1=p_2\thinspace ;\ \ldots\] En fait, il n’y a que trois trajectoires avec des angles de la forme \(\dfrac{p}{13}\) ; elles sont représentées sur la figure suivante.

Les angles indiqués sont des treizièmes de tour : l’entier \(7\) correspond donc à \(\dfrac{7}{13}\) de tour, soit \(\dfrac{14\pi}{13}\) radians ou 193,85°. Les flèches joignent deux points lorsque le second est l’image du premier par le décuplement de l’angle.
Le lecteur intéressé par ces figures pourra visionner la vidéo de Mickaël Launay sur les tables de multiplication [3] 1.
Trajectoires finies
Deux types de trajectoires peuvent être distingués. Les premières sont les trajectoires finies : les points successifs \((x_n,y_n)\) n’occupent qu’un nombre fini de positions. Nous avons vu deux exemples de telles trajectoires en partant des points initiaux associés aux angles rationnels \(\dfrac{1}{7}\) et \(\dfrac{3}{13}\) ; les trajectoires correspondantes sont même périodiques, puisqu’elles repassent indéfiniment par le point de départ \((x_0,y_0)\). Un exemple encore plus simple est fourni par l’angle \(t_0=0\), qui correspond au point \((1,0)\) ; ce point est fixé par la transformation \(f\) donc \((x_n,y_n)=(1,0)\) pour tout \(n\) et la trajectoire est réduite au singleton \(\{(1,0)\}\). Il n’y a que neuf trajectoires qui sont réduites à un singleton : ce sont celles des points fixés par \(f\), il s’agit donc de résoudre l’équation \(10\,t\equiv t\pmod{1}\), et ces points correspondent donc aux angles \(\dfrac{p}{9}\pmod{1}\), avec \(0\leq p \leq 8\).
Si l’on démarre avec l’angle \(t_0=\dfrac{2}{25}\) alors \(t_1=\dfrac{4}{5}\) puis \(t_2=0\) correspond au point fixe \((1,0)\), si bien qu’ensuite la trajectoire reste perpétuellement au point \((1,0)\). Il s’agit donc d’une trajectoire finie, mais qui n’est pas périodique (elle ne repasse jamais par son point de départ) ; on dit parfois qu’elle est pré-périodique.
Toutes les trajectoires finies que nous avons décrites pour l’instant sont associées à des angles rationnels. C’est qu’il n’y en a pas d’autres :
| Théorème |
|
Démontrons la première assertion. Une trajectoire périodique repasse périodiquement par sa position initiale. Supposons qu’elle revienne après \(N\) secondes, alors l’angle \(t_0\) du point de départ vérifie l’équation \(10^Nt_0\equiv t_0\pmod{1}\), car pour passer de \(t_0\) à \(t_N\) on décuple l’angle \(N\) fois ; il existe donc un entier \(k\) tel que \(10^{N}t_0=t_0+k\), si bien que
\(
t_0\equiv\dfrac{k}{10^{N}-1}\pmod{1}.
\)
Réciproquement, un angle de ce type correspond bien à un point périodique car \(10^Nt_0\equiv t_0\pmod{1}\).
Considérons maintenant un point d’angle \(t_0\) dont la trajectoire est finie. Notons \(T\) l’ensemble fini des angles ainsi obtenus ; puisque les angles \(t_n\) de la trajectoire appartiennent tous à \(T\), il existe forcément deux temps distincts \(m<n\) pour lesquels \(t_n=t_m\). La trajectoire de \(t_m\) repasse donc au même point après \(n-m\) itérations. Il existe donc un entier \(k\) tel que \(t_m=\dfrac{k}{10^{n-m}-1}\cdotp\) Puisque \(t_0\) vérifie \(10^mt_0\equiv t_m\pmod{1}\), on voit que \(t_0\) aussi est rationnel. Réciproquement, supposons \(t_0\) rationnel, et écrivons \(t_0=\dfrac{p}{q}\) avec \(p\) et \(q\) entiers et \(0\leq p< q\). Nous avons vu ci-dessus que la suite des angles \(t_n\) est formée de quotients \(\dfrac{p_n}{q}\) avec \(p_{n+1}\equiv10p_n\pmod{q}\). Il y a seulement \(q\) possibilités pour les angles \(t_n\), donc la trajectoire du point d’angle \(t_0=\dfrac{p}{q}\) comporte au plus \(q\) éléments. Ceci démontre la seconde assertion.
La dernière assertion résulte de la remarque suivante : tout angle \(t_0\) est arbitrairement proche d’un nombre rationnel \(t_0’\) de la forme
\(t_0′ \equiv\dfrac{k}{10^{N}-1}\pmod{1}.\)
Ainsi, toute position initiale \((x_0,y_0)\) est arbitrairement proche de positions initiales dont les trajectoires sont finies.
Trajectoires infinies
Les trajectoires infinies sont plus difficiles à analyser. Si \(t\) est un nombre réel entre \(0\) et \(1\), on peut écrire \(t\) sous forme décimale
\(
t=0, a_1 a_2a_3\ldots a_k \ldots,
\)
chacun des \(a_i\) étant un entier compris entre \(0\) et \(9\). La multiplication par \(10\) décale simplement cette écriture décimale d’un cran :
\(
10\,t=a_1,a_2a_3\ldots a_k\ldots.
\)
La partie entière \(a_1\) doit alors être retranchée pour rapporter \(10\,t\) dans l’intervalle \([0;1[\), si bien que
\(
10\,t\equiv0,a_2a_3\ldots a_k \ldots\pmod{1}.
\)
Ainsi, décupler l’angle consiste à décaler la suite \((a_1,\,a_2,\,a_3,\,\ldots,\,a_k,\,\ldots)\) d’un cran vers la gauche en oubliant le premier terme. D’un point de vue combinatoire, l’opération est donc très simple, et ce point de vue peut être employé pour obtenir des trajectoires aux propriétés spécifiques.
Commençons par exemple avec un angle \(t_0\) dont le développement décimal vérifie les propriétés suivantes :
-
les \(a_i\) valent \(0\) ou \(1\) ;
-
il y a une infinité de coefficients égaux à \(1\) ;
-
le nombre de \(0\) entre deux \(1\) successifs croît (strictement) indéfiniment.
Le développement décimal de \(t_0\) ressemble donc à ceci :
\(
t_0={0,01001000010000000010000000001000}\ldots
\)
Lorsqu’on multiplie \(t_0\) par \(10\), puis \(100\), puis \({1000}\), on décale le développement vers la gauche. Choisissons un grand indice \(j\) pour lequel \(a_j=1\).
Après \(j-1\) décalages successifs, on obtient alors \(10^{j-1}t_0\equiv{0,100}\dots\pmod{1}\) avec de nombreux \(0\) qui suivent le premier coefficient \(1\) (au moins \(j\) coefficients égaux à \(0\)). Ainsi \(10^{j-1}t_0\) est très, très proche de \({0,1}=\dfrac{1}{10}\cdotp\) Au sein de la trajectoire on peut donc trouver une suite de points qui converge vers le point d’angle \(\dfrac{1}{10}\cdotp\) De même, \(t_{j-2}\) est très, très proche de \({0,01}=\dfrac{1}{100}\) lorsque \(a_j=1\). Et \(t_{j-3}\) est très proche de \(\dfrac{1}{{1000}}\), etc. On peut alors démontrer que :
-
la trajectoire du point d’angle \(t_0\) est infinie ;
-
tous les angles rationnels de la forme \(10^{-k}\) sont approchés de manière arbitrairement précise par des angles de cette trajectoire ;
-
si un point est approché par cette trajectoire sans être situé sur cette dernière, alors son angle est de la forme \(10^{-k}\) pour un certain \(k> 0\).
Voici un second exemple : on commence par lister les suites constituées de chiffres \(a_j\) de l’ensemble \(\{0\, ;\,1\, ;\,2\, ;\,\ldots\, ;\,9\}\) et qui sont de longueur \(1\), puis \(2\), puis \(3\), etc. Pour former cette liste, nous pouvons utiliser l’ordre lexicographique, comme dans un dictionnaire mais avec les lettres remplacées par les chiffres. Pour les mots de longueur \(1\) nous obtenons donc la liste \(0\), \(1\), \(2\), \(\ldots\), \(9\). Pour les mots de longueur \(2\) nous obtenons cent possibilités, rangées ainsi :
\[\begin{aligned}
& 00,\ 01,\ 02,\ 03,\ 04,\ 05,\ 06,\ 07,\ 08,\ 09,\\[-3pt]
& 10,\ 11,\ 12,\ \ldots,\ 37,\ \ldots,\ 85,\ \ldots,\ 99.\end{aligned}\]
L’ordre lexicographique est donc équivalent à l’ordre usuel des nombres que l’on écrit. Mais l’on notera que le nombre \(7\) apparaît déjà deux fois dans nos listes : il apparaît dans les mots \(7\) et \(07\), de longueur respective \(1\) et \(2\). Ensuite, on continue en listant les suites de \(3\) chiffres, puis de \(4\) chiffres, etc. Nos suites de chiffres sont donc ordonnées par longueur, puis par ordre lexicographique pour les suites de longueur fixée.
Maintenant, définissons \(t_0\) par son développement décimal en juxtaposant les suites de chiffres que nous venons d’ordonner. Ainsi
\[\begin{aligned}
t_0=0,& 0123456789 \quad 00\,01\,02\,03\,04 \ldots 37 \ldots 85 \ldots \\[-3pt]
& 99\quad 000\,001\,002 \ldots 999\quad 0000\,0001 \ldots\end{aligned}\]
où les espaces sont simplement là pour faciliter la lecture.
Alors la trajectoire du point \((x_0,y_0)\) d’angle \(t_0\) est dense dans le cercle \(\mathscr{S}\). Autrement dit, pour tout angle \(s\) et toute précision \(\varepsilon > 0\), il existe un temps \(n\) tel que le point \((x_n,y_n)\) de la trajectoire ait un angle \(t_n\) qui soit \(\varepsilon\)-proche de \(s\) : \(\vert t_n-s\vert < \varepsilon\).
Pour le voir, on écrit le développement décimal \(s=0,b_1b_2\ldots b_\ell \ldots\) On choisit \(d\) tel que \(10^{-d}\) soit plus petit que \(\varepsilon\). La suite \(b_1\), …, \(b_d\) des coefficients de \(s\) entre le premier et le \(d\)-ième terme apparaît forcément au sein du développement de \(t_0\), car ce dernier contient toutes les suites finies de chiffres. Disons que cette suite apparaît entre le coefficient \(a_{m+1}\) et le coefficient \(a_{m+d}\) de \(t_0=0,a_1a_2\ldots\), ce qui signifie que \(a_{m+1}=b_1\), puis \(a_{m+2}=b_2\), jusqu’à \(a_{m+d}=b_d\). Le développement décimal de l’angle \(t_m\equiv10^mt_0\pmod{1}\) étant celui de \(t_0\) décalé de \(m\) places, il commence par \(a_{m+1}\), \(a_{m+2}\), etc. Il coïncide donc avec celui de \(s\) jusqu’au \(d\)-ième terme. Puisque \(10^{-d}< \varepsilon\), c’est que \(t_m\) et \(s\) sont \(\varepsilon\)-proches.
En fait, la dynamique du décuplement de l’angle, c’est-à-dire l’agencement des trajectoires obtenues par le processus d’évolution défini par \(f\), est très complexe.
Nous avons vu des trajectoires finies, dont la taille dépend de l’angle rationnel initial \(\dfrac{p}{q}\), des trajectoires infinies mais dont les accumulations sont simplement de la forme \(10^{-k}\pmod{1}\), et une trajectoire dense. Il existe aussi des trajectoires qui sont confinées dans un sous-ensemble de Cantor de \(\mathscr{S}\) et sont denses dans ce Cantor (voir [2]) ; pour cela on peut prendre des développements décimaux qui n’utilisent pas certains chiffres.
La dynamique est donc chaotique, au sens suivant : partant d’un point initial \((x_0,y_0)\) d’angle \(t_0\), il existe des perturbations arbitrairement petites \((x_0′ ,y_0′ )\) (correspondant à des angles \(t_0′ \) arbitrairement proches de \(t_0\)) qui satisfont — au choix — l’une des propriétés suivantes : la trajectoire de \((x_0′ ,y_0′ )\) est finie, ou est dense, ou est confinée dans un ensemble de Cantor. Par conséquent, si l’on ne connaît qu’une approximation, aussi bonne soit-elle, de \((x_0,y_0)\) ou de son angle \(t_0\) on ne peut savoir à l’avance quel sera le comportement de sa trajectoire.
Il est toutefois possible d’extraire un peu de structure de ces comportements chaotiques. Par exemple, les mathématiciens qui étudient les systèmes dynamiques ou le développement décimal des nombres réels savent donner un sens précis aux affirmations suivantes, et les démontrer : presque toute trajectoire est dense dans le cercle \(\mathscr{S}\) ; presque toute trajectoire est uniformément répartie. Ils utilisent pour cela les méthodes de la dynamique topologique ou de la théorie ergodique. C’est un sujet trop avancé pour être décrit ici, mais les personnes intéressées peuvent consulter[2] .
Quasi-cercles
Au début de ce texte, nous avons déjà évoqué le fait que l’application \(f\) peut-être définie par la formule \(f(z)=z^{10}\), \(z\) étant ici un nombre complexe situé sur le cercle unité \(\mathscr{S}\) que l’on écrit \(z=\exp(2\text{i}\pi t)\).
Au lieu de restreindre l’étude au cercle unité, on peut alors regarder les trajectoires de nombres complexes quelconques. Si l’on amorce la trajectoire en un point \(z_0\), on obtient ainsi une suite de nombres complexes \(z_1=z_0^{10}\), \(z_2= z_1^{10}=z_0^{100}\), etc. Lorsque \(z_0\) est un nombre complexe qui n’est pas sur le cercle, son module est soit strictement inférieur à \(1\) soit strictement supérieur à \(1\). La suite des points \(z_n\) vérifie \(\vert z_n\vert = \vert z_0\vert^{10^n}\) ; ainsi, lorsque \(\vert z_0\vert < 1\) le module de \(z_n\) tend extrêmement vite vers \(0\) et \(z_n\) tend vers l’origine du plan complexe2. De même, \(z_n\) part rapidement à l’infini lorsque \(\vert z_0\vert > 1\).
Il y a donc deux régions dans lesquelles la dynamique est prévisible, puisque les trajectoires y tendent respectivement vers \(0\) ou l’infini. Le cercle unité réalise une frontière entre ces deux régions ; d’un côté du cercle les trajectoires vont vers \(0\), de l’autre elles partent à l’infini, et sur la frontière \(\mathscr{S}\) la dynamique est riche, chaotique.
Maintenant, que se passe-t-il si la transformation \(f(z)=z^{10}\) est légèrement perturbée ? Par exemple, que se passe-t-il si, en fait, la règle d’évolution n’est pas édictée par \(f\) mais par la transformation \[g_c(z)=z^{10}+c\] où \(c\) est un petit nombre complexe non nul ? Eh bien le même comportement subsiste, du moins si \(c\) est suffisamment petit. Le cercle \(\mathscr{S}\) doit être remplacé par une courbe \(\mathscr{S}(c)\) qui dépend de \(c\). Cette courbe \(\mathscr{S}(c)\) est invariante par la transformation \(g_c\), et les trajectoires de \(g_c\) situées sur cette courbe sont similaires à celles de \(f\) sur le cercle \(\mathscr{S}\).
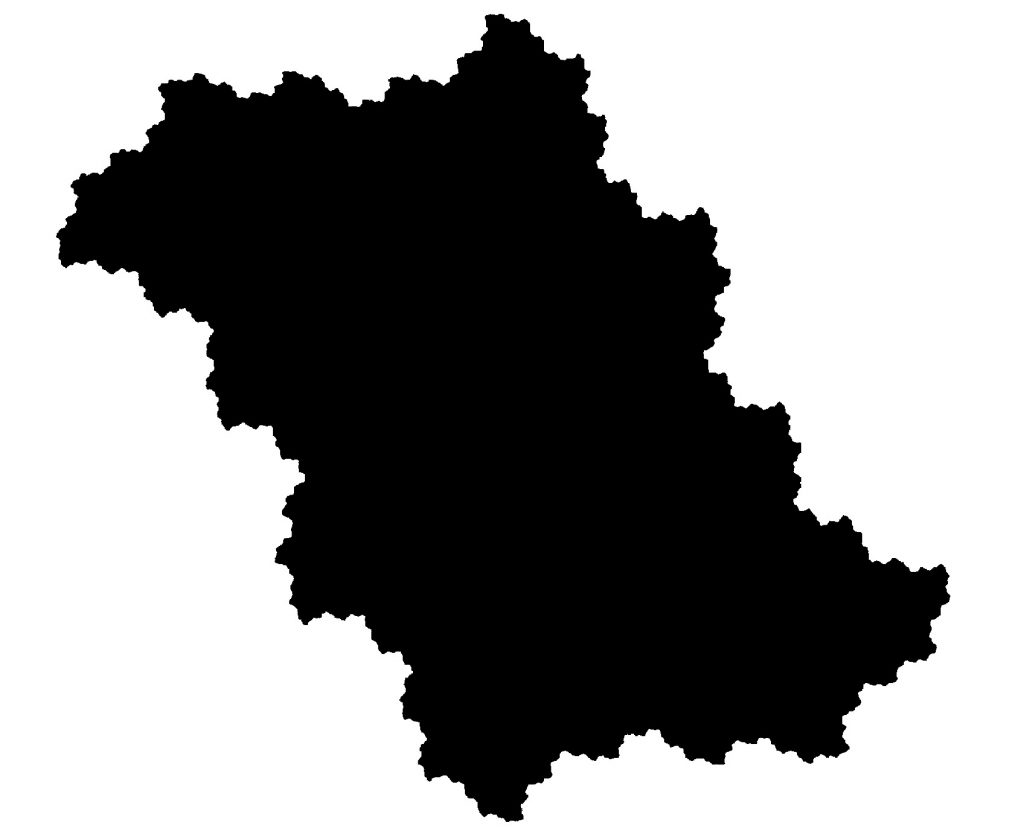
Un quasi-disque, en noir, bordé par un quasi-cercle. Cette figure correspond à la transformation \(h(z)= z^2+ \dfrac{\text{i}}{2}\cdotp\) Les points à l’intérieur de la zone noire ont une trajectoire simple, qui converge rapidement vers le nombre complexe \(\dfrac{2-\sqrt{2+2\sqrt{5}}+\text{i}\sqrt{2\sqrt{5}-2}}{4}\cdotp\) Au bord, la dynamique est semblable à celle du doublement de l’angle sur le cercle \(\mathscr{S}\).
Cette courbe \(\mathscr{S}(c)\) sépare le plan complexe en deux zones sur lesquelles les trajectoires de \(g_c\) sont similaires à celles de \(f\) hors de \(\mathscr{S}\). Mais \(\mathscr{S}(c)\) est seulement continue ; c’est un objet à l’aspect fractal lorsque \(c\neq 0\). Dans le jargon mathématique, \(\mathscr{S}(c)\) est un quasi-cercle.
Ces quasi-cercles sont des exemples d’ensemble de Julia [1]. Ils apparaissent aussi dans la théorie des groupes kleiniens, de la géométrie des espaces de petite dimension, en analyse complexe…
Références
-
Lennart Carleson et Theodore W. Gamelin. Complex Dynamics. Universitext, Springer Verlag. 184 p.↩
-
Yves Coudène. Théorie ergodique et systèmes dynamiques. EDP Sciences. 205 p.↩
-
Mickaël Launay. Site MicMaths : la face cachée des tables de multiplication (12 min 7 s).
 (Visité le 25/01/2019).↩
(Visité le 25/01/2019).↩
⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅♦⋅⋅⋅⋅⋅⋅⋅⋅⋅⋅
Serge Cantat est directeur de recherche au CNRS (Centre National de la Recherche Scientifique). Il travaille à l’IRMAR (Institut de Recherche MAthématique de Rennes), université de Rennes 1.
-
Vous pouvez aussi vous référer à l’article «Dessous de table : la face cachée des tables de multiplication en partie dévoilée !» de Anne-France Acciari et Mathias Zessin dans le numéro 527 d’Au fil des maths
.↩ -
Son logarithme décimal vaut \(\log(\vert z_0\vert)10^n\), et \(\log(\vert z_0\vert)\) est strictement négatif.↩